



















Beyond Data, Toward Wisdom: Why Bio-Inspired Robotics is the Key to "Civilized" AI
Discover why scaling Large Language Models isn’t enough for socially acceptable robots. This deep dive explores the shift from raw Embodied AI to Bio-inspired Cognitive Robotics, arguing that true "wisdom" in machines requires a developmental, human-centric approach to intelligence.

A significant recent announcement in the field of robotics comes from the journal Frontiers in Robotics and AI, which published a landmark perspective on the future of autonomous agents in early 2026. The article, titled "Bio-inspired cognitive robotics vs. embodied AI for socially acceptable, civilized robots," was authored by Pietro Morasso and released on January 12, 2026 (Morasso, 2026). This publication is particularly relevant to the global community of tech enthusiasts who follow advancements in "Embodied AI" and the integration of ethics into machine intelligence.
Article Summary
The article addresses a critical transition in the robotics industry: the movement of robots from the controlled environments of industrial assembly lines (Industry 3.0) into the complex, unpredictable fabric of human society (Industry 4.0 and beyond). Morasso argues that for robots to become truly "civilized" and socially acceptable, they must move beyond being mere "super-intelligent" tools driven by Large Language Models (LLMs) or Embodied Artificial Intelligence (EAI).
Key highlights include:
-
The Roadmap Debate: The author compares two competing paradigms for robotic development:
-
EAI (Embodied Artificial Intelligence): Relying on massive foundation models to dictate behaviour.
-
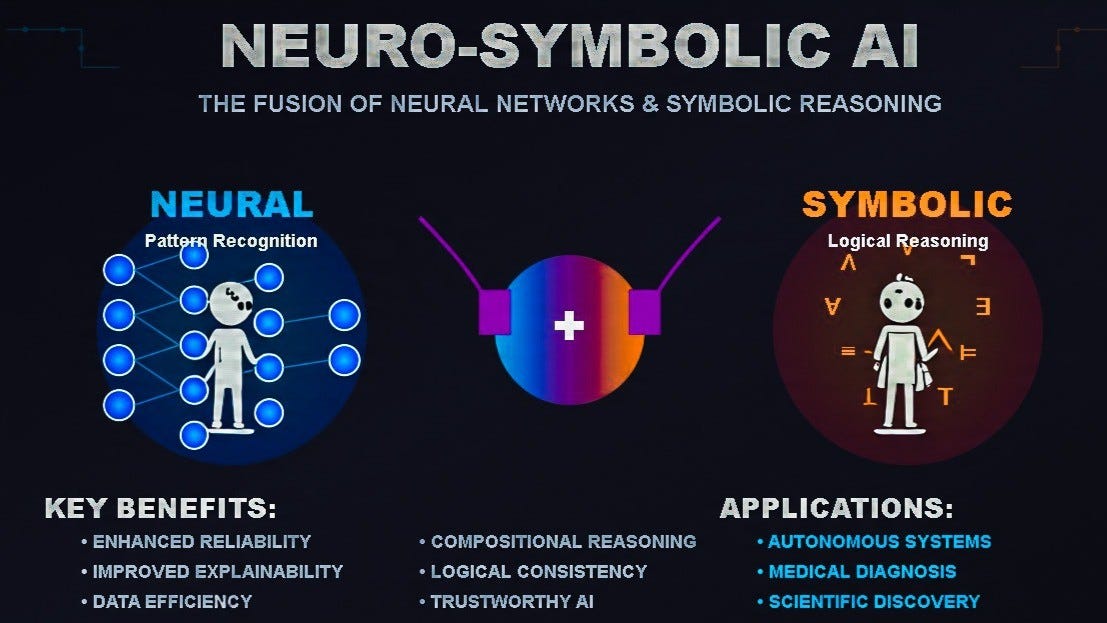
Bio-inspired Cognitive Robotics: Architectures based on embodied cognition, developmental psychology, and social interaction.
-
-
Ethical Autonomy: Morasso suggests that current foundation models are "ethically agnostic" because they are intrinsically disembodied. He proposes that true "wisdom"—the ability to make right-vs-wrong decisions in conflict situations—requires a bio-inspired cognitive architecture that learns through physical and social development rather than just data ingestion.
-
Computational Frugality: The paper advocates for "computational frugality," emphasizing that effective human-robot interaction (HRI) should be based on enaction theory and ecological psychology rather than the energy-intensive scaling of current AI models.
Our Opinion: The Quest for the "Civilized" Machine
The narrative presented by Morasso is both timely and technically provocative. In terms of completeness, the article successfully bridges the gap between abstract AI ethics and practical robotic control. It correctly identifies the "cognitive interaction" hurdle—where a robot’s goals might conflict with a human's—as a much larger challenge than simple physical safety. By contrasting the popular "Embodied AI" trend (driven by companies like Tesla and Figure) with "Bio-inspired Cognitive Robotics," the article provides a necessary reality check for enthusiasts who believe that scaling LLMs is the sole path to AGI.
However, the narrative could be considered slightly incomplete regarding the immediate hardware limitations. While the author focuses on the "brain" of the robot, the physical "body" (actuators, battery density, and haptic sensors) remains a significant bottleneck that the article touches upon only briefly. Furthermore, the correctness of the "wisdom" hypothesis—that robots must evolve like children to be ethical—is an ongoing debate. Critics might argue that "guardrail" programming or alignment tuning in foundation models could achieve social acceptability much faster than long-term developmental learning. Nevertheless, for readers of
Direct Source Link:
References
Morasso, P. (2026). Bio-inspired cognitive robotics vs. embodied AI for socially acceptable, civilized robots. Frontiers in Robotics and AI, 12.
Written/published by AI Quantum Intelligence with the help of AI models.
What's Your Reaction?
 Like
0
Like
0
 Dislike
1
Dislike
1
 Love
0
Love
0
 Funny
0
Funny
0
 Angry
0
Angry
0
 Sad
0
Sad
0
 Wow
0
Wow
0